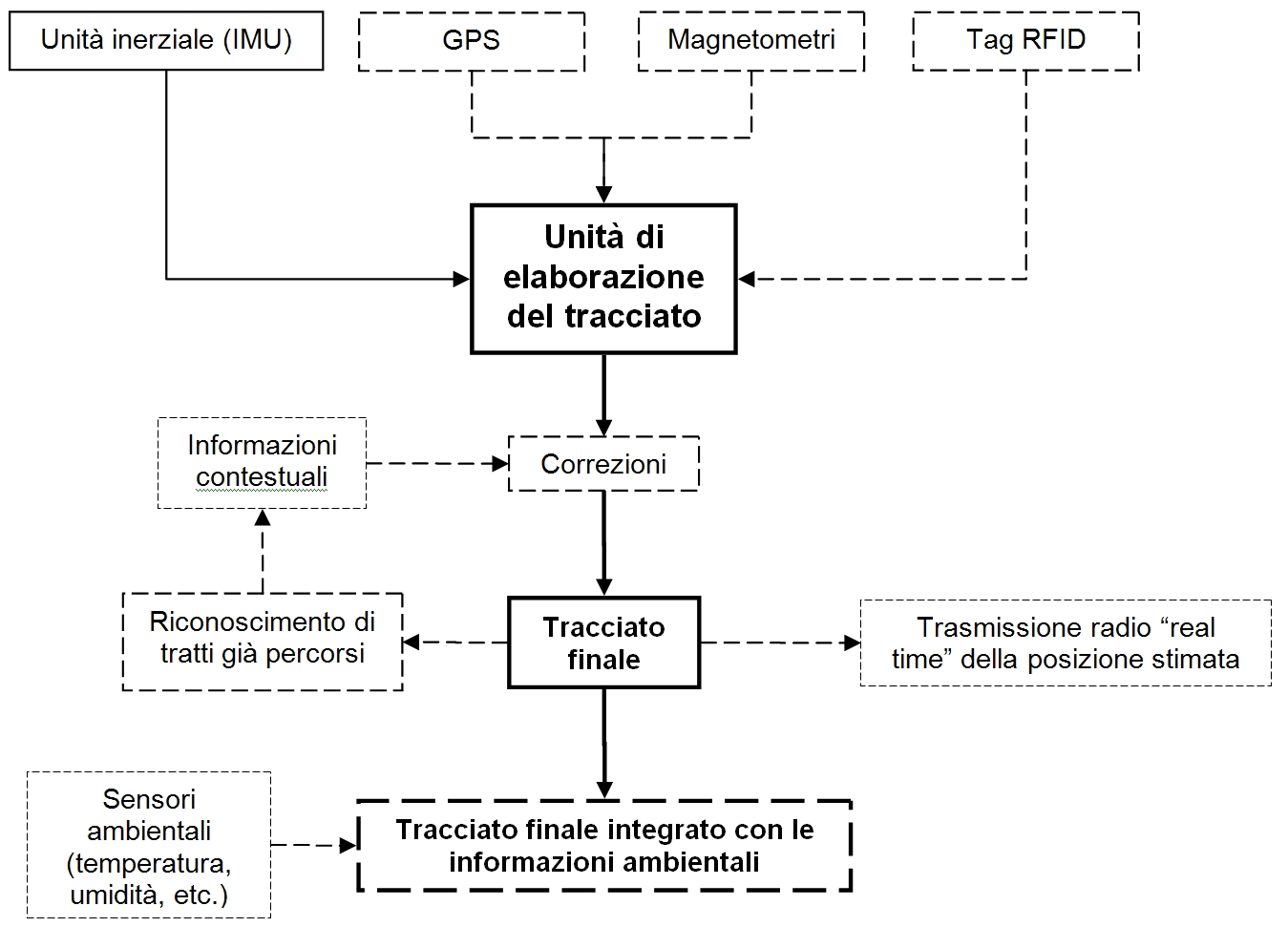
Uno schema a blocchi degli elementi logico-funzionali del sistema EXPLORERS è riportato nella figura in basso. In essa si nota come alcuni sensori o processi possano o meno essere disponibili o affidabili ed anche come il sistema sia comunque in grado di fornire una stima del tracciato, la cui accuratezza sarà funzione dei sensori/processi disponibili.
Per aumentare significativamente l’accuratezza delle stime planimetriche, EXPLORERS raffina la stima della planimetria non solo mediante la fusione automatica dei dati magnetometrici, ma soprattutto con la correzione di posizione proveniente da tag RFID disposti nell’ambiente. Ogni volta che l’operatore ripassa in prossimità di un tag RFID rilasciato in precedenza, la differenza fra la sua posizione attuale e quella stimata in precedenza (all’atto del rilascio) costituisce un fattore correttivo utilizzato per migliorare la stima della mappa dell’ambiente. Un elemento di ulteriore raffinamento del sistema risiede nell’uso delle “informazioni contestuali”: nel caso in cui i medesimi tratti vengano ripercorsi più volte, le stime pregresse di un tratto percorso in precedenza sono impiegate per raffinare le stime attuali del medesimo segmento.