La tesi svolta
Diamo una breve spiegazione su cosa sono gli Agenti
Autonomi. La gestione e la pianificazione della
produzione ha da sempre avuto un approccio risolutivo di tipo centralizzato,ma
a partire dalla fine degli anni '70 si sono sviluppate diverse teorie secondo
le quali parte della gestione della produzione poteva essere dimandata
anche a livelli più bassi, in questa ottica gli agenti autonomi
sono un possibile approccio a quesa problematica. Essi sono delle entità
in grado di decidere ciò che devono fare ed il miglior sequenziamento
da dare al lavoro senza coinvolgere nella loro scelta livelli di controllo
superiori se non per ricevere delle direttive di massima. Ad un primo approccio
si può pensare che per ogni singola macchina costituente la cella
robotizzata esista un agente autonomo e ciò è vero ma non
esaurisce la tematica di gestione complessiva della cella di produzionei,
infatti esiste un altro agente autonomo che risiede nella fila di attesa
nel magazzino e che gestisce l'ingresso dei pezzi. L'innovazione della
mia tesi risiede proprio nella presenza di questo ulteriore agente che
si occupa di attuare un'inseguimento tra domanda ed offerta di lavoro nel
modo più proficuo possibile. Il suo ruolo è assimilabile
per una parte dei suoi compiti al battitore d'asta che aggiudica l'oggetto
battuto al migliore offerente, ossia la macchina che garantisce di svolgere
per prima il lavoro sul pezzo, e seleziona precedentemente l'oggetto da
'battere' secondo una logica, una funzione di valutazione di tipo dinamico,
che favorisce l'oggetto che il mercato, inteso come altre macchine che
opereranno successivamente o l'acquirente, richiede nel più breve
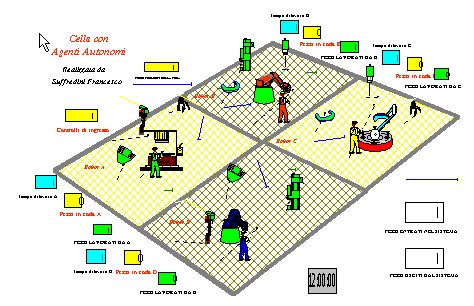
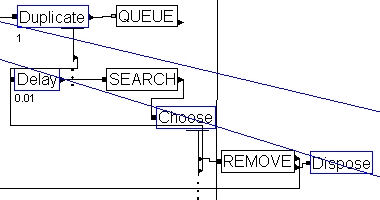
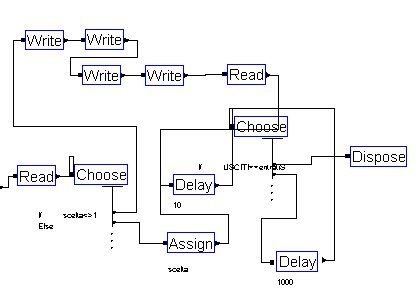
tempo.Qui sotto si possono vedere due esempi del foglio di lavoro di Arena con cui è stato implementato il modello della cella ed esattamente la coda di ingresso ed il modulo che si occupa di selezionare la funzione obbiettivo migliore. |

Un robot costituente la cella di produzione |
I miei interessi
Ho sempre coltivato come interesse la conoscenza di culture
diverse viaggiando; ho studiato due anni presso il liceo francese di Roma,
e sono stato molte volte in Francia, oltre che in altri paesi, sia per
svago che nel ruolo di guida turistica. Amo molto la pittura impressionista
e lo stile neoclassico. Oltre a dedicarmi al volontariato pratico sport:
palestra, tennis e basket; come si può notare da questa pagina amo
molto gli animali e posseggo un setter irlandese, che mi è fin troppo
affezionato, di nome Brutus. |

"My beautifull dog" |