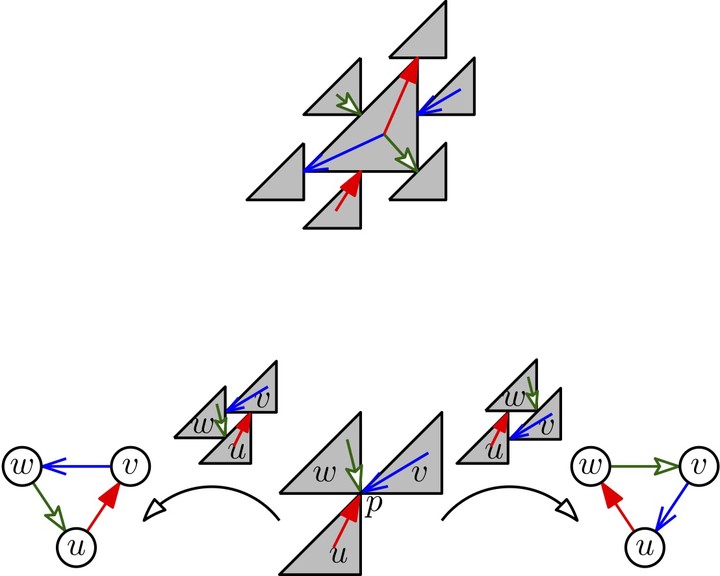
 From an RT-representation to a Schnyder wood. Non-degenerate (top) and degenerate (bottom) case.
From an RT-representation to a Schnyder wood. Non-degenerate (top) and degenerate (bottom) case.
Abstract
We consider the problem of morphing between contact representations of a plane graph. In a contact representation of a plane graph, vertices are realized by internally disjoint elements from a family of connected geometric objects. Two such elements touch if and only if their corresponding vertices are adjacent. These touchings also induce the same embedding as in the graph. In a morph between two contact representations we insist that at each time step (continuously throughout the morph) we have a contact representation of the same type.
We focus on the case when the geometric objects are triangles that are the lower-right half of axis-parallel rectangles. Such RT-representations exist for every plane graph and right triangles are one of the simplest families of shapes supporting this property. Thus, they provide a natural case to study regarding morphs of contact representations of plane graphs.
We study piecewise linear morphs, where each step is a linear morph moving the endpoints of each triangle at constant speed along straight-line trajectories. We provide a polynomial-time algorithm that decides whether there is a piecewise linear morph between two RT-representations of a plane triangulation, and, if so, computes a morph with a quadratic number of linear morphs. As a direct consequence, we obtain that for 4-connected plane triangulations there is a morph between every pair of RT-representations where the ‘‘top-most’’ triangle in both representations corresponds to the same vertex. This shows that the realization space of such RT-representations of any 4-connected plane triangulation forms a connected set.